Iterative Methods
Solving $Ax=b$ by successive approximation: Jacobi, Gauss-Seidel, and Conjugate Gradients.
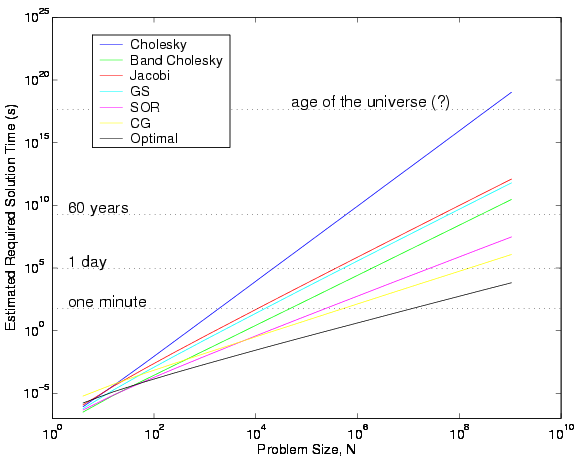
Direct Solvers: Complexity Recap
Before diving into iterative methods, let's review the cost of direct methods for $Ax=b$.
| System Type | Complexity |
|---|---|
| Diagonal | $\mathcal{O}(n)$ |
| Tridiagonal | $\mathcal{O}(n)$ |
| Triangular (Forward/Back Sub) | $\mathcal{O}(n^2)$ |
| Banded ($m$-band) | $\mathcal{O}(m^2 n)$ |
| Full System (GE / LU) | $\mathcal{O}(n^3)$ |
Approximate Solutions
What if we don't need the exact solution $x^*$? We seek an approximation $\hat{x}$ such that $\|\hat{x} - x^*\| \le \epsilon$.
The Residual
We can't calculate the error $e = x^* - \hat{x}$ directly (since we don't know $x^*$). Instead, we use the residual:
Note: $\hat{r} = A e$.
Measuring Size
How "big" is the residual? Use norms:
- $\|r\|_1 = \sum |r_i|$
- $\|r\|_2 = \sqrt{\sum r_i^2}$
- $\|r\|_\infty = \max |r_i|$
Iterative Strategy
Given a guess $x^{(0)}$, how do we improve it?
Ideally: $x^{(1)} = x^{(0)} + A^{-1}r^{(0)}$. But computing $A^{-1}$ is too expensive.
Strategy: Approximate $A^{-1}$ with a matrix $Q^{-1}$ that is cheap to compute.
Jacobi Method
Approximates $A$ with its diagonal $D$.
Gauss-Seidel Method
Approximates $A$ with its lower triangle ($D-L$). Uses updated values immediately.
Convergence
When do these methods work? Let's look at the error propagation.
Condition for Convergence
The iteration converges if the spectral radius of the iteration matrix is less than 1:
Sufficient Condition
If $A$ is Diagonally Dominant ($|a_{ii}| > \sum_{j \ne i} |a_{ij}|$), then Jacobi and Gauss-Seidel guaranteed to converge.
Conjugate Gradients (CG)
For Symmetric Positive Definite (SPD) matrices, we can view solving $Ax=b$ as minimizing the quadratic function: \[ \phi(x) = \frac{1}{2} x^T A x - x^T b \]
The Idea
Instead of going down the steepest gradient (which zig-zags), we search in conjugate directions. This guarantees convergence in at most $n$ steps (in exact arithmetic).
🧠 Final Challenge +20 XP
Which method updates the solution vector using the most recent values available within the same iteration step?